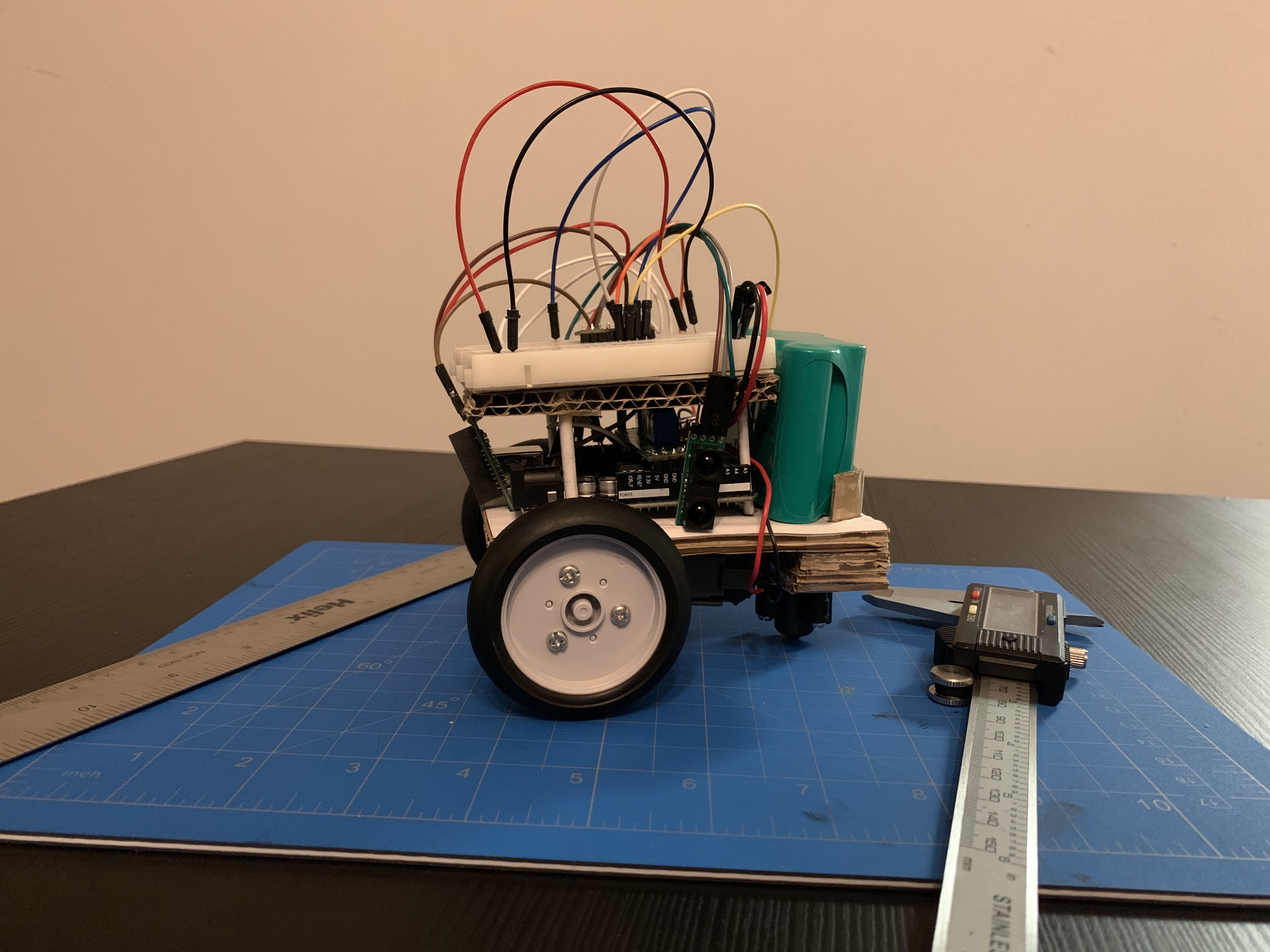
Today, I continued to work on the chassis. I decided to use cardboard once again as I could not find a software to utilize my 3D-printer for this project. During...
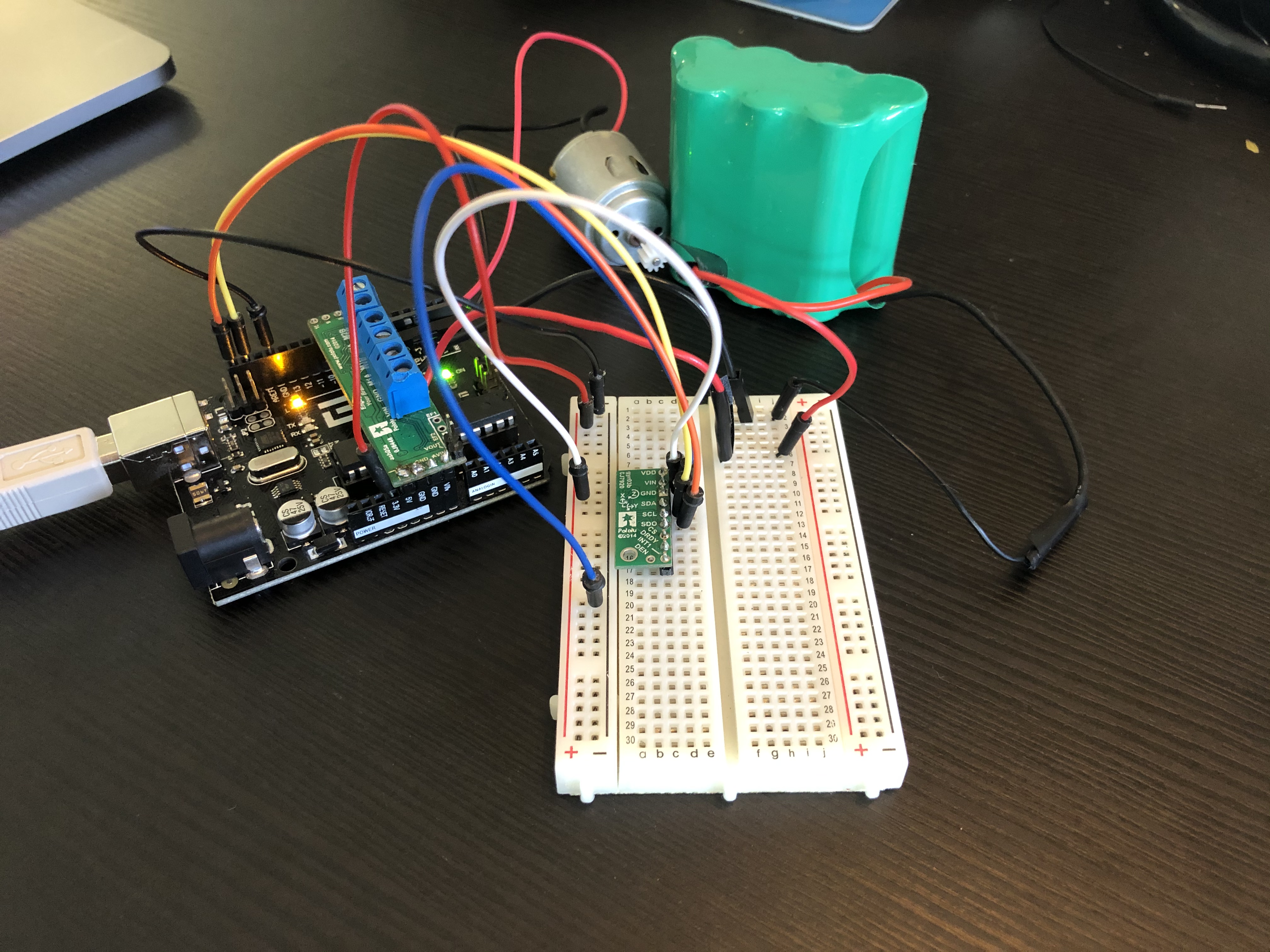
Today, I started to work on building the foundation of my robot. I attempted building a potential design for how my robot would be structured. I planted my breadboard, Arduino,...
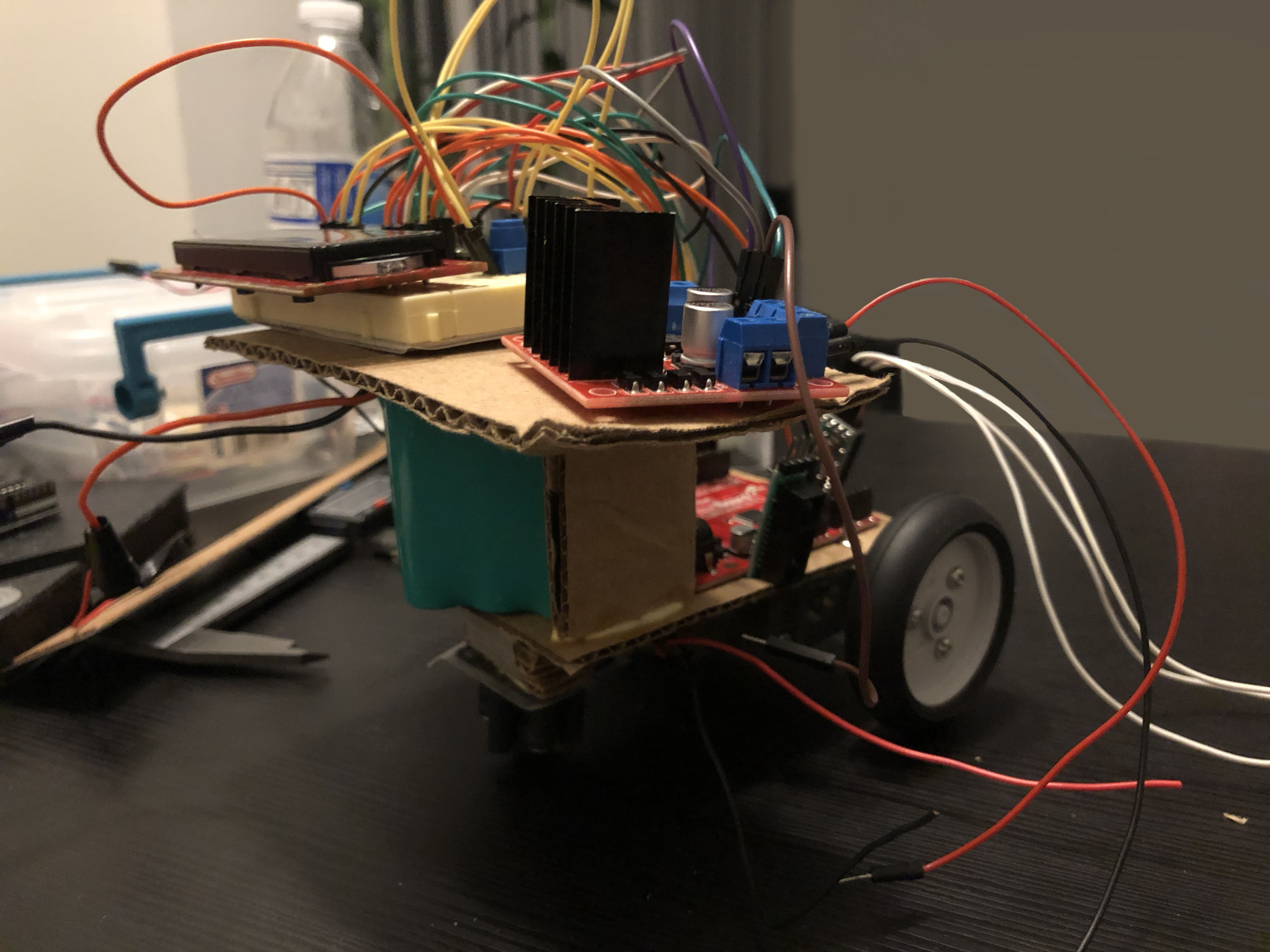
Today, I experimented with the IR sensor. While experimenting with the sensor, I was able to see the limits of the accuracy of the sensor. From what I observed, I...
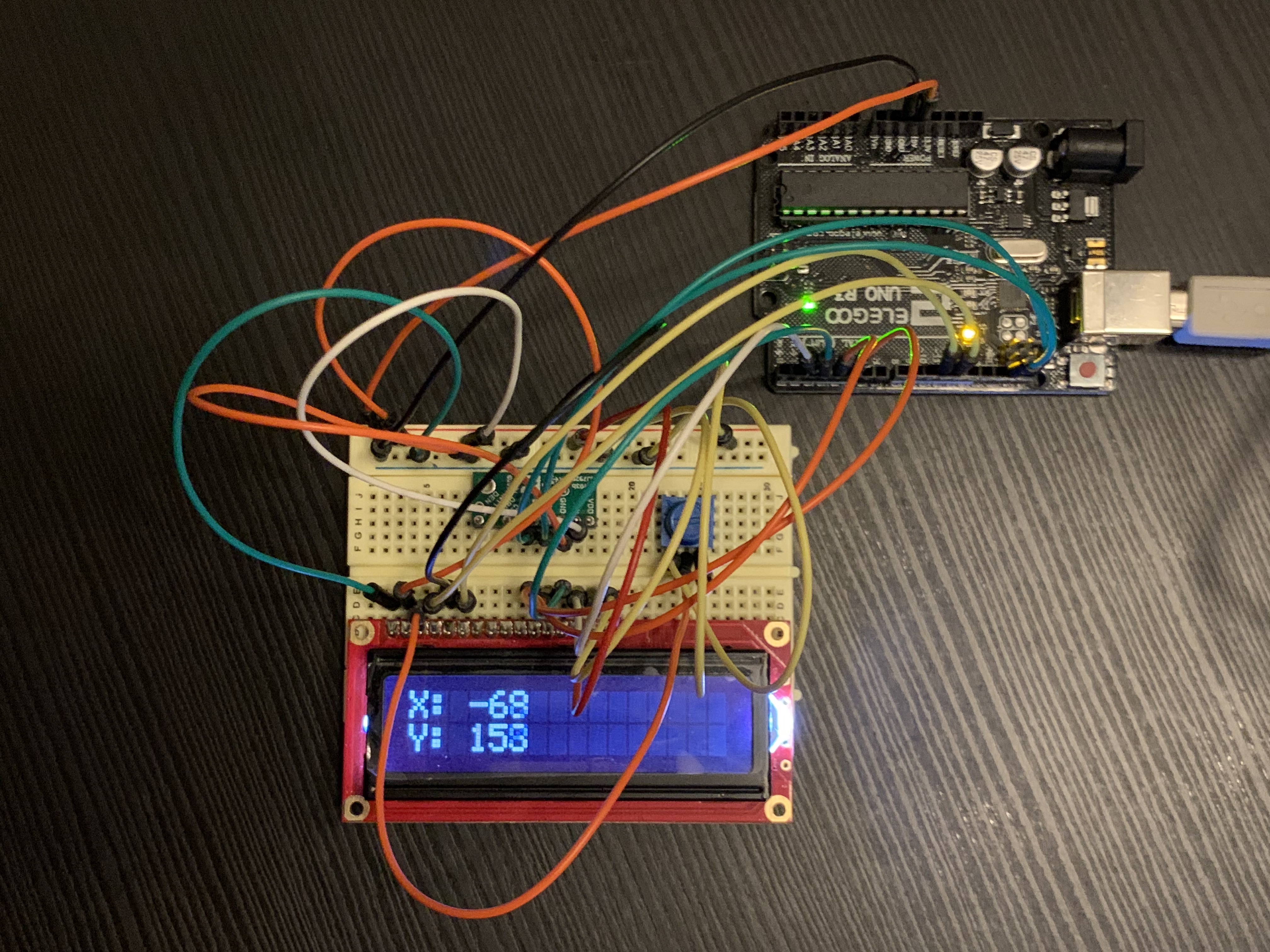
Today I worked with both the gyroscope and The LCD display. At first, I experimented with the gyroscope by checking the serial monitor. From the monitor, I saw that the...