Purchasing the Robot's Eye-R's
Written by Kev on

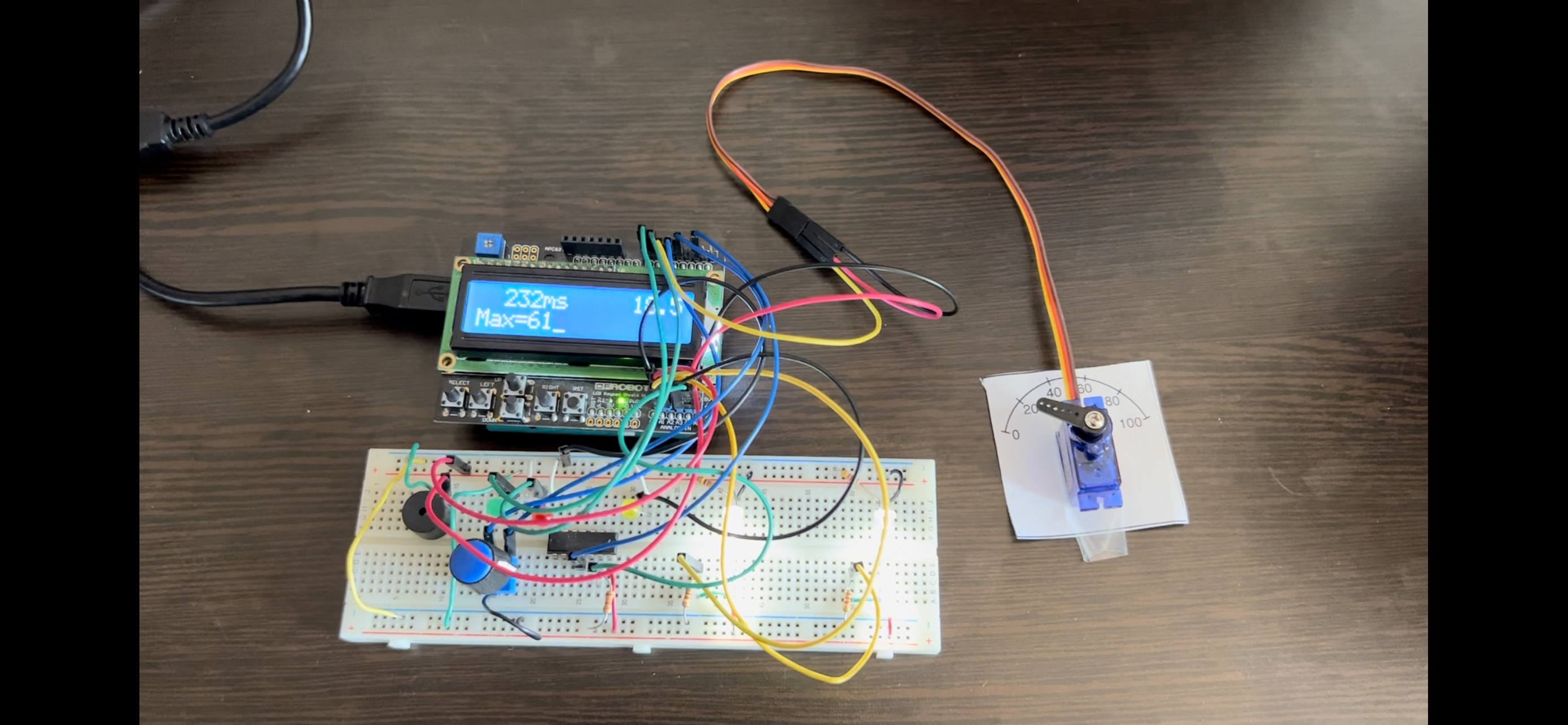
Today, I experimented with the IR sensor. While experimenting with the sensor, I was able to see the limits of the accuracy of the sensor. From what I observed, I realized that the sensor was not able to give an accurate estimate on any object that was less than 10 centimeters away from the sensor. Anything within this range will produce a faulty answer. As for the observations beyond 10 centimeters, within a 30 centimeter range, it provided pretty accurate results. However, beyond the 30 centimeter mark, it had many fluctuations in part due it trying to calculate the distance between the various objects. I also attempted to write a code that translated the values produced by the sensor to centimeters to make it easier to understand.
Explore more like this

Sophomore Summer Internships
This summer, I am interning at Deloitte as a Cybersecurity Analyst in New York City. I will be following up from my internship last year at Deloitte by starting off...

Sophomore Spring Semester Reflections
This past sophomore year, I was able to gain greater insight to my future career. As a Computer Science and Computer Engineering major, I had the opportunity to interact with...
Comments