Swapping out motorcontroller
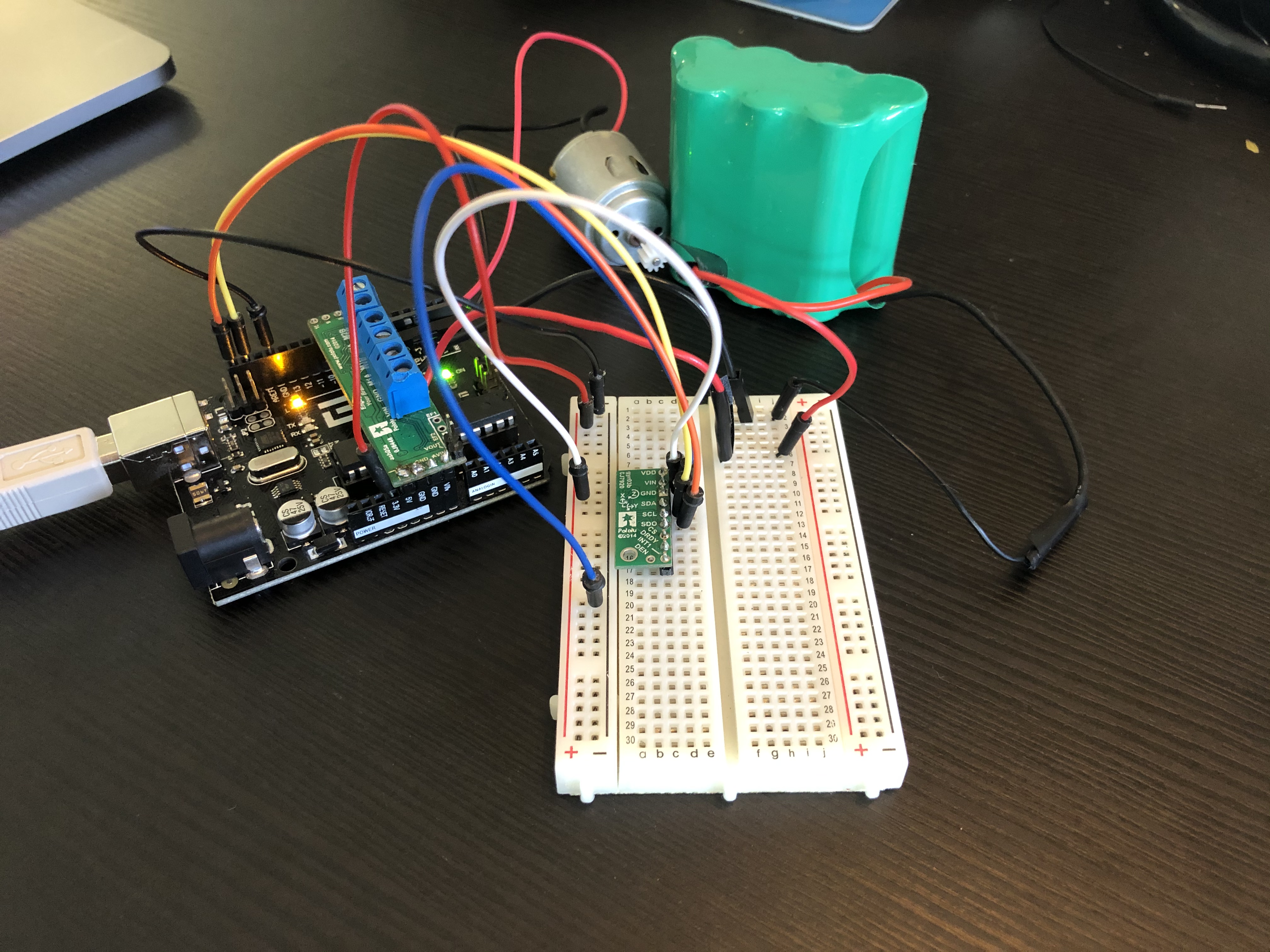
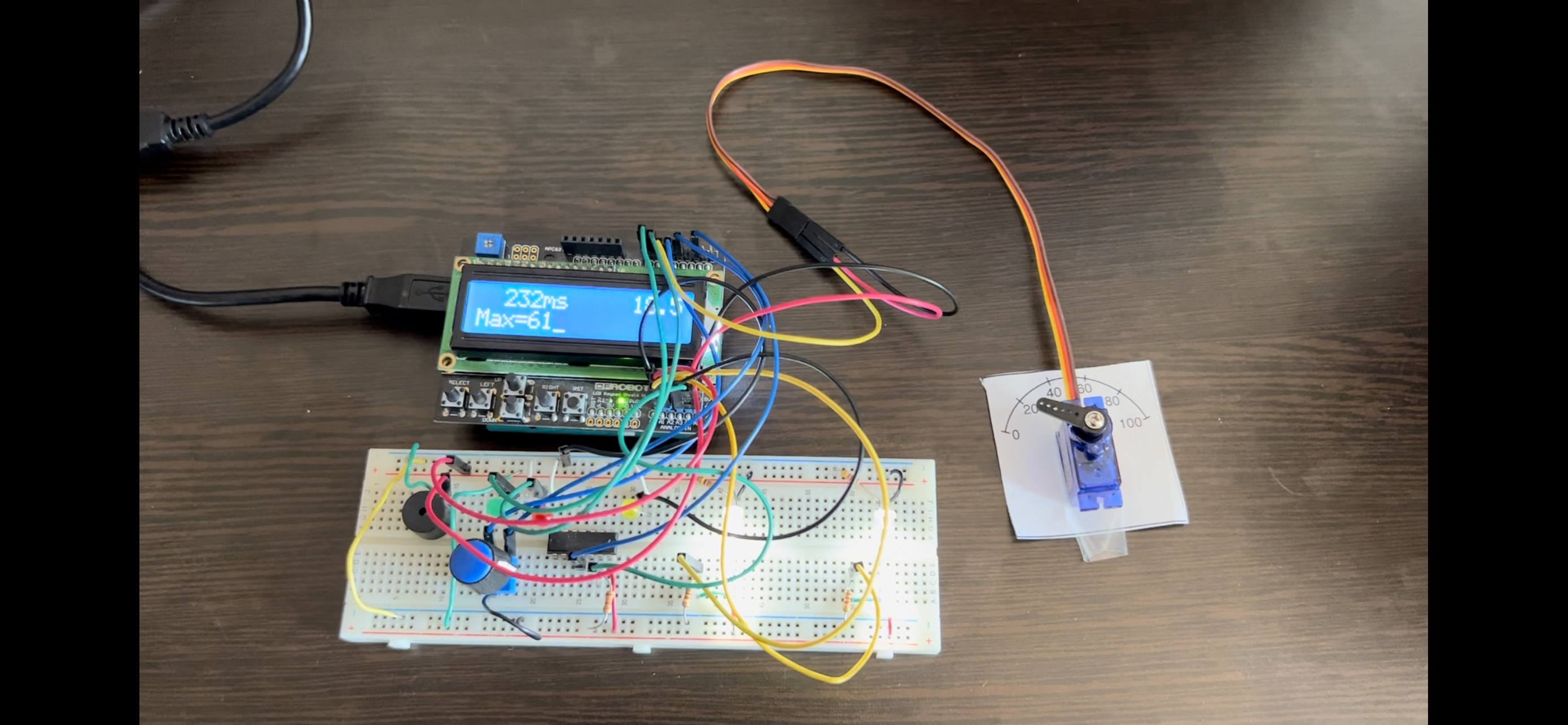
Today I attempted to connect my motor and the L298N motor driver. I found out that I could keep the jumper and set the motor speed to be high or low instead of using enable pins to control the speed of the motor. After connecting the motor and the motor driver, I decided to test out the system by connecting it to a power supply. However, when I connected the wires to the battery, the motor did not budge. I took me a bit to realize that the battery was not a 12 volt battery but rather an 8.4 v battery. This resulted in the motor driver input not receiving enough power for the motor to spin so the motor would not run. In order to correct this, I gave an attempt at the 5v input but this also gave similar results. The motor did not function as it normally would and the reason was that the input was outside the acceptable range for the motor. After going through this, we decided to try and utilize the Pololu dual motor shield as the new motor driver. With the new motor driver, we were able to effectively get the motor to start spinning. However, during the process, a problem arose as the LCD display produced random numbers and symbols and not the values from the gyroscope. After dismembering the LCD display and attempting to reconnect the wires multiples times, the LCD display produced the same results. From this result, we decided to remove the LCD display from the robot.
Explore more like this

Sophomore Summer Internships
This summer, I am interning at Deloitte as a Cybersecurity Analyst in New York City. I will be following up from my internship last year at Deloitte by starting off...

Sophomore Spring Semester Reflections
This past sophomore year, I was able to gain greater insight to my future career. As a Computer Science and Computer Engineering major, I had the opportunity to interact with...
Comments